Graph Augmentation for GNNs

이미지 같은 데이터에 적용되는 augmentation은 흔히 봤을 것입니다. 하지만 그래프의 augmentation은 생소합니다. 언제 augmentation이 필요할까요? Feature가 너무 부족하거나, graph가 너무 sparse/dense/large한 경우 기존 그래프로 computational graph를 그리면 비효율적인 경우가 발생하게 됩니다.

각 문제의 경우마다 서로 다른 방향의 augmentation이 가능합니다. Sparse해서 문제라면 edge를 추가하면 되고, 너무 dense하다면 반대로 sampling 하면 될 것입니다.

Adjacency matrix만 있는 경우, node에 constant value를 assign하거나, one-hot vector를 assign 합니다. one-hot은 expressive power는 높습니다. 하지만 inductive 하지 못합니다. 그리고 computational cost가 높습니다. constant value로 채우는 경우는 그 반대입니다. 연산량이 비교적 작으면서 transductive해도 아쉽지 않을 때 one-hot을 사용합니다.
One-hot vector를 잘 활용하면 graph가 어떤 길이의 cycle을 갖는지 파악하게 할 수도 있습니다. 이게 중요한 이유는 computational graph를 그렸을 때, 위 슬라이드의 두 $v_1$은 서로 구분되지 못하기 때문입니다. Augmented된 one-hot vector로는 구분 가능합니다. 이 외에도 clustering coefficient, pagerank 등의 lecture 2에서 배운 feature를 추가할 수도 있습니다.

Edge와 node를 추가하는 방법은 어떤 효과를 가질까요? 먼저 bipartite graph의 경우 adjacency matrix를 $A$가 아닌 $A+A^2$를 넣어주게 되면, 서로 연결되지 않았던 node group(위 슬라이드에서는 authors) 사이의 연결성이 확보됩니다.
Edge가 부족하여 node간 shortest path가 먼 경우에는, node 몇 개만 적소에 추가해주면 shortest path가 비약적으로 감소합니다. Message passing을 훨씬 더 효율적으로 할 수 있게 되는 장점이 존재합니다. 교통 네트워크도 너무 regular하여 sparse한 특징이 있는데, node를 add 해주면 message passing에 도움이 될 것으로 보입니다.

너무 dense하게 퍼져있는 node의 문제를 해결하기 위해 neighborhood를 sampling하면 어떤 효과를 가질까요? Neighborhood를 sampling하는 경우와 하지 않는 경우 사실 embedding의 기댓값은 차이가 없습니다. Computational cost를 낮출 수 있는 장점은 확보하면서 full graph와 같은 값을 얻을 수 있으므로, 훌륭한 방법입니다. 다만 이 그래프가 정말 dense한지는 여러 statistics를 통해서 파악해야 할 것 입니다.
Prediction with GNNs

지금까지 살펴본 내용은 그래프 입력의 node embedding을 구하고, augmentation하는 내용이었습니다. 이제는 얻어진 feature로 어떤 계층에서 task를 진행할지를 논의해봅시다. 여기서는 prediction head라는 말로 표현되어있는데, prediction task를 진행할 위계로 이해하면 쉬울 것 같습니다.
Prediction heads는 task의 종류에 따라 크게 세 가지로 나눌 수 있고 각각 node-level, edge-level, graph-level에 해당합니다.

Node-level prediction은 node embedding에서 바로 진행될 수도 있습니다. d-dimension embedding을 k개의 class를 분류하는 문제에 적용하고 싶다면 단순히 $k*d$의 행렬을 곱해주면 됩니다.

Edge-level prediction은 node-level prediction과 크게 다르지 않습니다. 다만 node $u$와 $v$의 embedding을 같이 사용한다는 점에서 차이가 납니다. 단순히 concatenation한 다음 MLP를 통과 시킬수도 있지만, 이러면 permutation invariant한 성질을 유지하기 어렵습니다. 그래서 dot product한 이후에 MLP를 통과시키는 식으로 문제를 피할 수 있습니다.

Graph-level prediction을 진행할 때는 그래프를 구성하는 node embedding을 활용합니다. 마치 aggregation function과도 흡사한데, node embedding중 평균을 도출할 수도 있고, max를 얻을 수도 있고, sum을 할 수도 있습니다. 하지만 mean/max/sum pooling은 작은 그래프에서만 잘 작용한다고 합니다.

위 슬라이드는 문제가 드러나는 예시입니다. $G_{1}=\left\{ -1, -2, 0, 1, 2 \right\}$와 $G_{2}=\left\{ -10, -20, 0, 10, 20 \right\}$은 분명 다른 node embedding으로 구성된 두 그래프 입니다. 하지만 sum pooling 결과 두 그래프 모두 0이라는 하나의 (원소가 1개인) 벡터가 되는 것을 볼 수 있습니다.
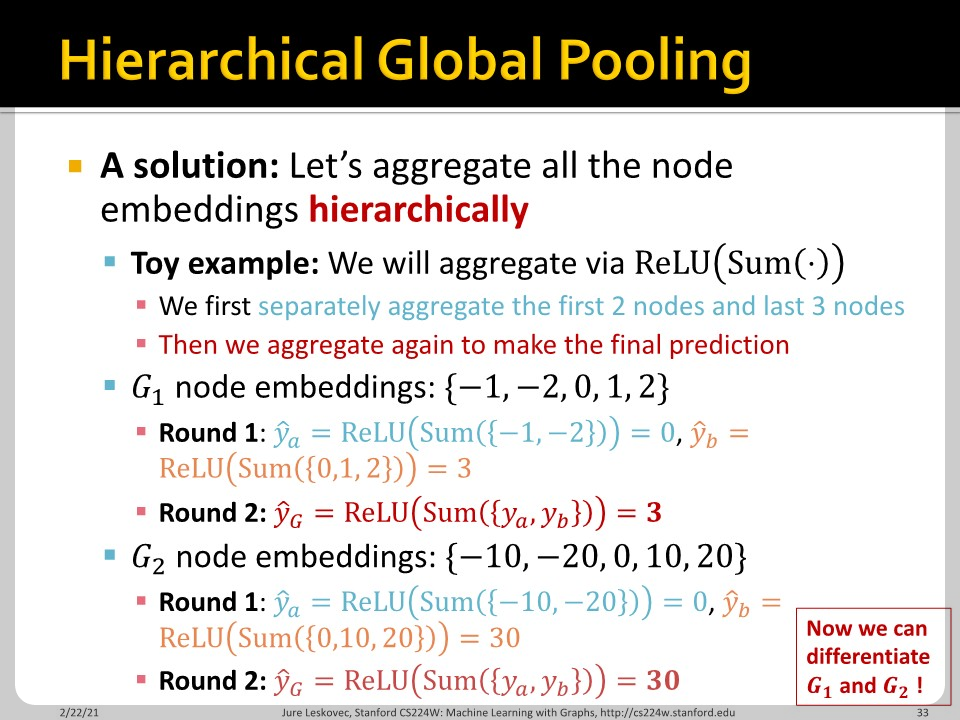
이런 문제를 방지하기 위해 hierarchical global pooling을 시행합니다. Node 5개를 2개와 3개로 구분하여서 각각 ReLU(Sum)을 취해주면 $G_1$과 $G_2$는 3과 30으로 서로 다른 graph embedding을 갖습니다. 이런 아이디어를 기반으로 하여 DiffPool이 등장하기도 했습니다. 예전에 제가 커버했던 MinCutPool과도 연관이 있는 내용입니다.
'Machine Learning > CS224W' 카테고리의 다른 글
| CS224w - 09. Designing the Most Powerful Graph Neural Network Part 1 (0) | 2022.03.24 |
|---|---|
| CS224w - 08. GNN Augmentation and Training Part 2 (0) | 2022.03.22 |
| CS224w - 07. A General Perspective on Graph Neural Networks Part 2 (0) | 2022.03.20 |
| CS224w - 07. A General Perspective on Graph Neural Networks Part 1 (0) | 2022.03.19 |
| CS224w - 06. Graph Neural Networks Part 2 (0) | 2022.03.16 |



