세 번째 graph neural network(GNN)을 활용한 시계열 예측 논문입니다. 제목은 GMAN: A Graph Multi-Attention Network for Traffic Prediction 입니다.
GMAN: A Graph Multi-Attention Network for Traffic Prediction
- 2020년 4월 3일 publish
- In Proceedings of the AAAI conference on artificial intelligence
- Chuanpan Zheng, Xiaoliang Fan, Cheng Wang, and Jianzhong Q
- 2022년 8월 10일 기준 citation 수 342회
샤먼 대학교 연구진들의 연구 내용입니다. (샤먼 대학교는 샤먼시에 위치하는데, 무속인과는 관계가 없습니다. 샤먼은 하문이라는 한자를 중국어로 읽었을 때의 음에 해당합니다.) 주안점 및 과거 연구의 한계, 활용 데이터 및 기타 설정, 인접 행렬 설계, 모델 설계 사항, 모델 내 데이터 차원, 모델 설계 특이점, 결과 및 분석, 결과 특이 사항, 교통 공학적 분석 내용, 결과 특이사항, 의문점 및 느낀점 순으로 정리해보겠습니다.
주안점 및 과거 연구의 한계
- Encoder-decoder architecture의 설계
- 과거 연구들과 유사하게 같은 time stamp 안에서는 spatial correlation, 다른 time stamp 끼리는 temporal correlation을 적용함

- Complex spatio-temporal correlations을 파악하였음. Dynamic spatial correlations은 시간에 따라서 중요도가 높은 센서가 변함. Non-linear temporal correlations은 temporal correlation의 non-linear한 부분을 파악함. 동일 시간에서는 spatial correlation을 보고, 동일 node에 대해서는 temporal correlation을 보는 듯
- Sensitivity to errror propagation을 해결함. 현재의 error는 미래 나중에 큰 error로 증폭될 수 있는데, 그 문제를 완화 시킴
활용 데이터 및 기타 설정
- Xiamen dataset (Wang et al. 2017): 95개 수집점, 속도 데이터, 5분 단위 집계, 2015년 8월 1일~2015년 12월 31일
- PeMS dataset (Li et al. 2018b): 325개 수집점, 속도 데이터, 5분 단위 집계, 2017년 1월 1일~ 2017년 6월 30일
- Z-score method로 normalize
- 70% training, 10 validation, 20% testing
- 1시간 데이터로 그 다음 1시간 예측
- Adam optimizer, learning rate = 0.001, Xiamen data는 19개/PeMS data는 37개의 그룹으로 계산
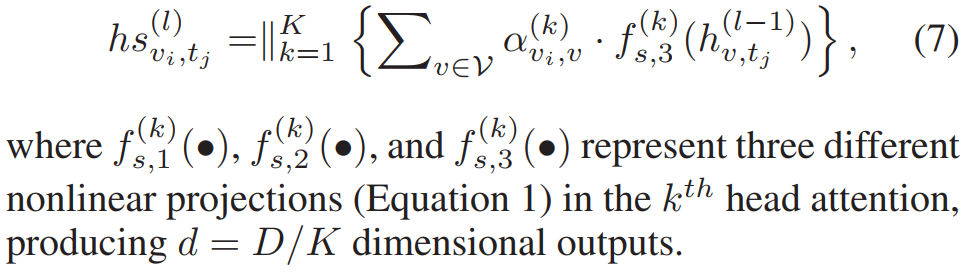
- Attention block 수 L=3, Attention head 수 K=8, 그리고 각 head의 차원 d=8 (D=64)
인접 행렬 설계
- 거리 기반으로 인접행렬 설계하였음
- The adjacency matrix represents the proximity (measured by the road network distance) between vertex vi and vj.
모델 설계 사항
- 아래 Figure 2(a)는 GMAN의 전체 framework, Figure 2(b)는 Spatio-Temporal Embedding(STE), Figure 2(c)는 ST-Attention Block의 모습임
- STE는 그래프 G와 시간 t1,...,tP,...,tP+Q를 input으로 받음. 그래프 구조 자체와 시간의 time stamp를 input으로 받는듯. 여기서 만들어진 embedding은 element-wise합이 되어서 각 block에 쓰임
- ST-Attention Block은 전 ST-Attention Block의 H(l−1)을 input으로 받아서 각각 Spatial Attention과 Temporal Attention으로 전달함. 그 이후에 Gated Fusion을 거쳐 Hl 생성
- Spatial Embedding: Spatio-Temporal Embedding에서는 여기서 소개한 적 있는 node2vec을 기반으로 spatial embedding을 진행함. 그 결과물을 2-layer FC에 넣어서 spatial embedding eSvi∈RD where vi∈V를 얻음. (여기서 S는 단순히 sptial이라는 것을 나타내기 위해 붙인 첨자)
- Temporal Embedding: 조금 특이하게, 이 모델에서는 시간 자체를 embedding함. (propose a temporal embedding to encode each time step into a vector). 일주일에 요일이 7개고, 하루를 5분으로 쪼개면 288개니까 R7 차원의 벡터랑 R288 차원의 벡터 concatenate해서 R295 차원 벡터를 얻음. 그리고 그 R295 차원 벡터를 2-layer FC에 넣어서 RD를 얻음. Historical(input) 시간이 P이고, future(output) 시간이 Q일 떄, 결론적으로 eTtj∈RD where tj=t1,...,tP,...,tP+Q. 마찬가지로 T는 temporal의 T
- STE는 spatial embedding과 temporal embedding을 element-wise로 더하여 evi,tj=eSvi+eTtj로 함. 이때 evi,tj∈E, E∈R(P+Q)×N×D
- ST-Attention Block의 input H(l−1)에는 node(vertex) vi의 시간 time step tj에 대한 h(l−1)vi,tj가 있고, h(l−1)vi,tj∈H(l−1). Spatial attention의 output H(l)S, Temporal attention의 output H(l)T. Node(vertex) vi의 시간 time step tj에 대한 hidden state는 spatial attention에서 hs(l)vi,tj, temporal attention에서 ht(l)vi,tj
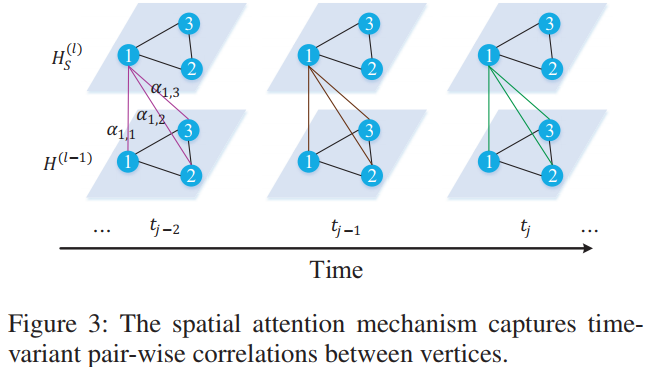
- Spatial Attention: hs(l)vi,tj=∑v∈Vαvi,v⋅h(l−1)v,tj, ∑v∈Vαvi,v=1, 여기서 αvi,v는 vi에게 v가 얼마나 중요한지를 나타냄. 위 식이 equation 2에 해당함
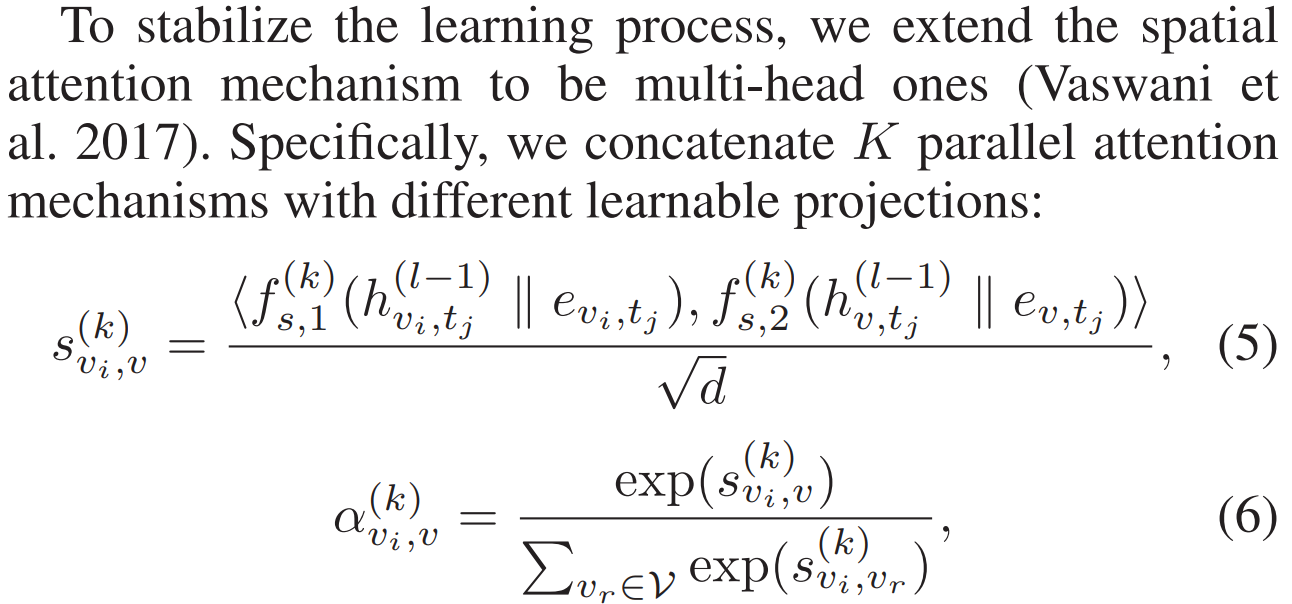
- Non-linear transformation을 아래와 같이 정의하고, multi-head attention으로 전체 과정을 stabilize함. 위의 equation 3, equation 4와 다른 점은 multi-head attention 여부와 non-linear transformation의 여부

- Temporal Attention: 전 time step의 feature가 뒤에도 영향을 미칠 수 있도록 모델이 설계되었음. 이때에도 마찬가지로 attention mechanism이 포함됨
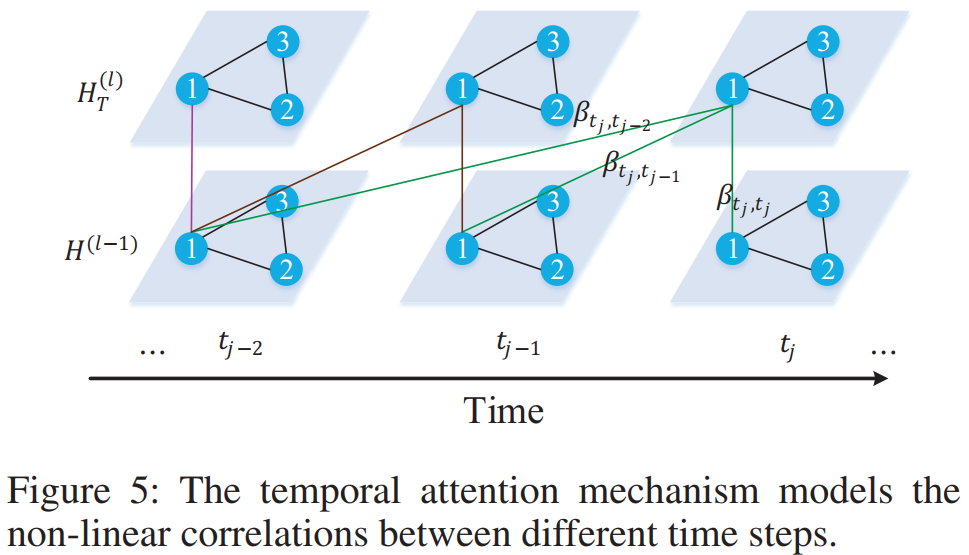
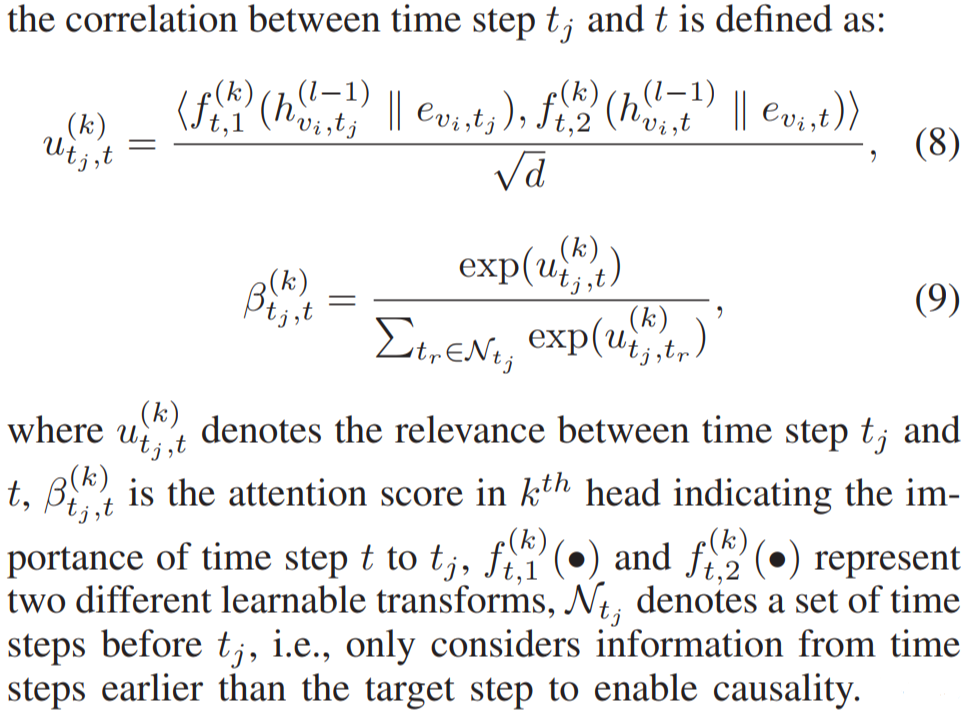
- 최종적으로 얻어지는 ht(l)vi,tj는 아래와 같음
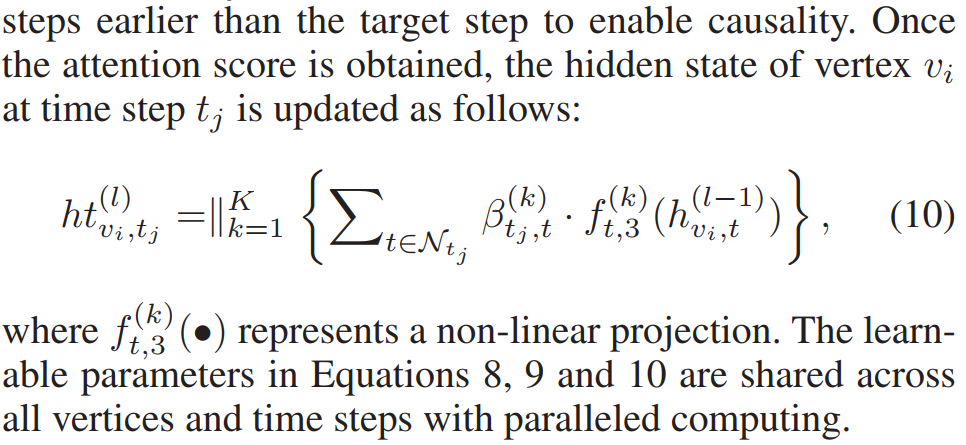
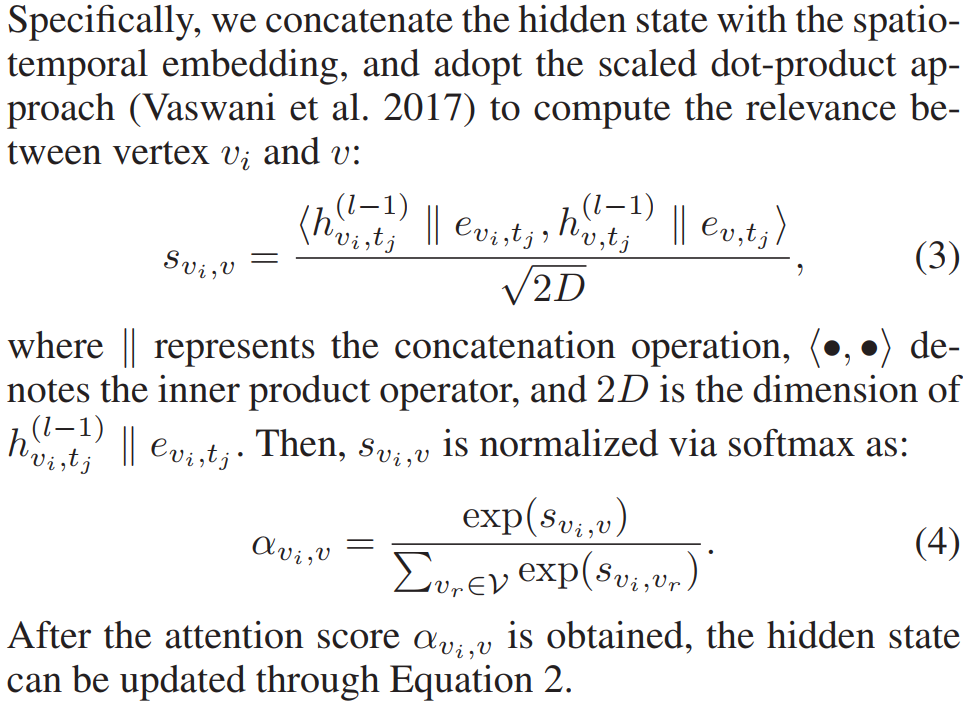
- Spatial attention과 temporal attention은 연산 적용 대상은 다르지만 같은 연산 과정을 가짐. STE의 결과물과 전 layer의 hidden embedding을 concat하고, 이를 non-linear를 포함하는 FC에 통과하시키고, 목적하는 node(혹은 times tep)과 내적하여 값(energy)을 얻어냄. 그 값은 마치 transformer의 energy를 softmax 시킨 것을 attention value로 하여서 (l) layer의 embedding을 구함
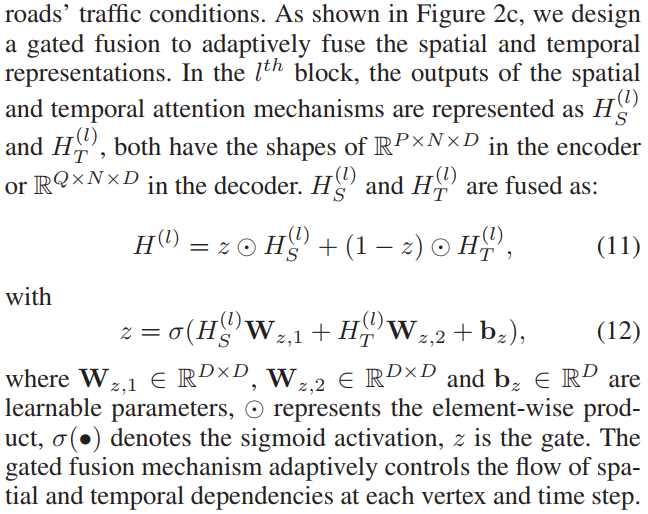
- Gated Fusion: 쉽게 말하면 spatial한 feature와 temporal한 feature 사이에 가중치를 둔 것인데, 그냥 두지 않았음. 세개의 learnable parameter를 가지고 그 가중치를 학습하게 했음
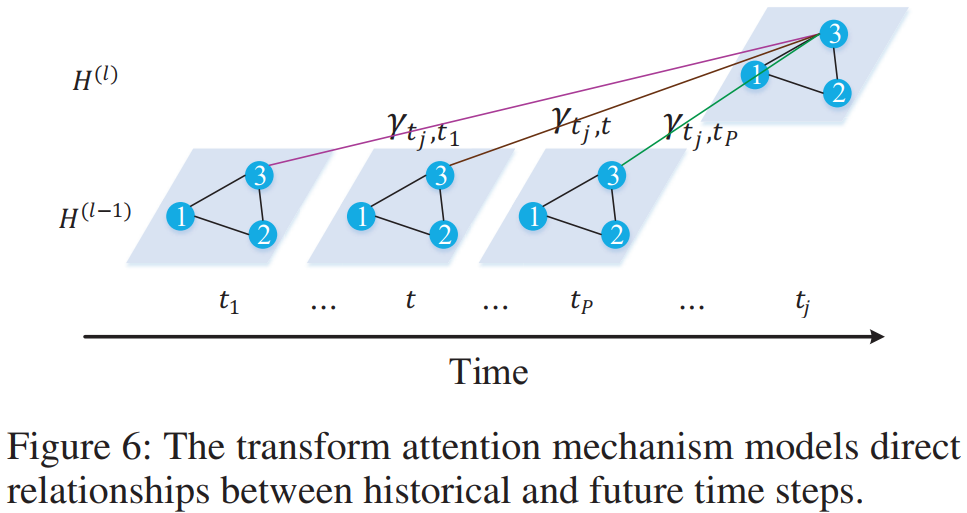
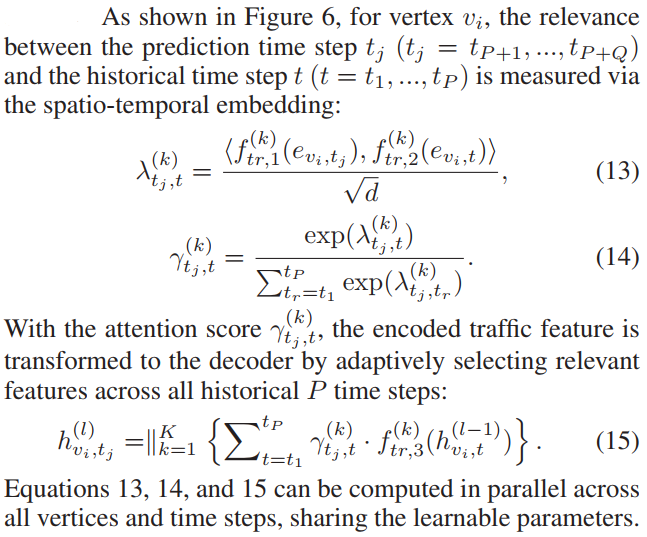
- Transform Attention: 매 future time step(tj=tP+1,...,tP+Q)과 모든 historical time step(t=t1,...,tP)의 관계를 고려함. 결국 여기서도 또 어텐션이 활용됨. 리뷰어 의견을 원천 차단하려고 관계가 있는거는 모조리 어텐션을 쓴 것 같음
- Encoder-Decoder: Minor한 부분을 제외하고, 크게 보자면 전체 과정은 다음과 같음. Encoder에 들어가기 전, historical observation χ∈RP×N×C는 FC를 통해서 H(0)∈RP×N×D로 변환됨. L번째 layer에서도 H(L)∈RP×N×D가 유지됨. Transform attention에서 H(L+1)∈RQ×N×D로 바뀌며, decoder의 마지막까지 H(2L+1)∈RQ×N×D 차원으로 감. 마지막 FC layer에서 ˆY∈RQ×N×C로 종결되며, loss는 MAE loss를 사용함
모델 내 데이터 차원
- G=(V,E,A)
- |V|=N, A∈RN×N
- C = length of feature number, Traffic condition at time step t은 graph signal Xt∈RN×C
- Historical P time steps χ=(Xt1,Xt2,...,XtP)∈RP×N×C
- Predictions of next Q time steps ˆY=(ˆXtP+1,ˆXtP+2,...,ˆXtP+Q)∈RQ×N×C
- Spatial embedding eSvi∈RD where vi∈V
- Temporal embedding eTtj∈RD where tj=t1,...,tP,...,tP+Q
- STE evi,tj∈E, E∈R(P+Q)×N×D
- h(l−1)vi,tj∈H(l−1)
- Historical observation χ∈RP×N×C → FC → H(0)∈RP×N×D → Encoder H(L)∈RP×N×D → Transform Attention H(L+1)∈RQ×N×D → Decoder H(2L+1)∈RQ×N×D → FC → ˆY∈RQ×N×C
모델 설계 특이점
- Temporal Embedding에서 시간 자체를 embedding하는데, (propose a temporal embedding to encode each time step into a vector) 시간 embedding 과정을 세세하게 보여준 논문은 드문듯
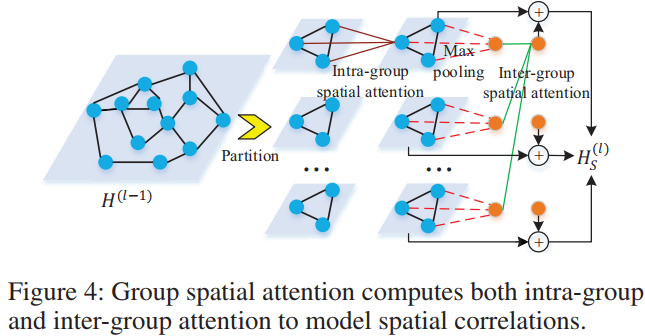
- Attention을 n개 node에 대해서 다 하면 n-by-n으로 연산량 너무 높으니까, group을 지어 연산하기도 하였다. Intra-group spatial attention을 구하고, max-pooling한 이후 inter-group spatial attention을 구했음. 다만 이 max-pooling이 무엇을 기준으로 했는지 확실하지 않음. h(l−1)vi,tj value를 기반으로 했다고 생각함
결과 및 분석
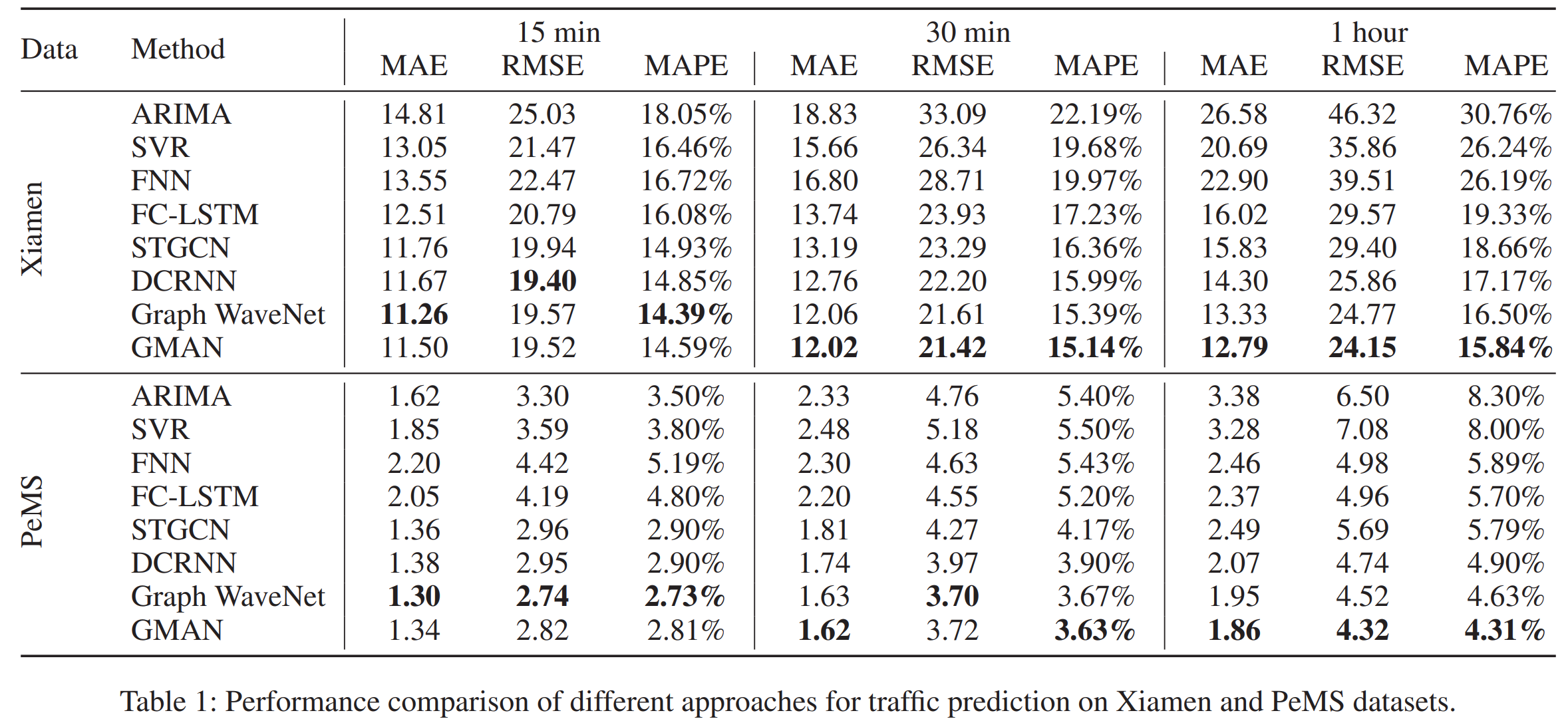
- 먼 시간 간격을 두고 있는 문제에 대해서 좋은 성능을 보임
결과 특이 사항
- 예측 시간이 멀때 더 좋은 결과를 보임. 해당 결과는 T-test로 입증 (하지만 test set이 충분히 많아서 p-hacking의 여지가 있을듯)
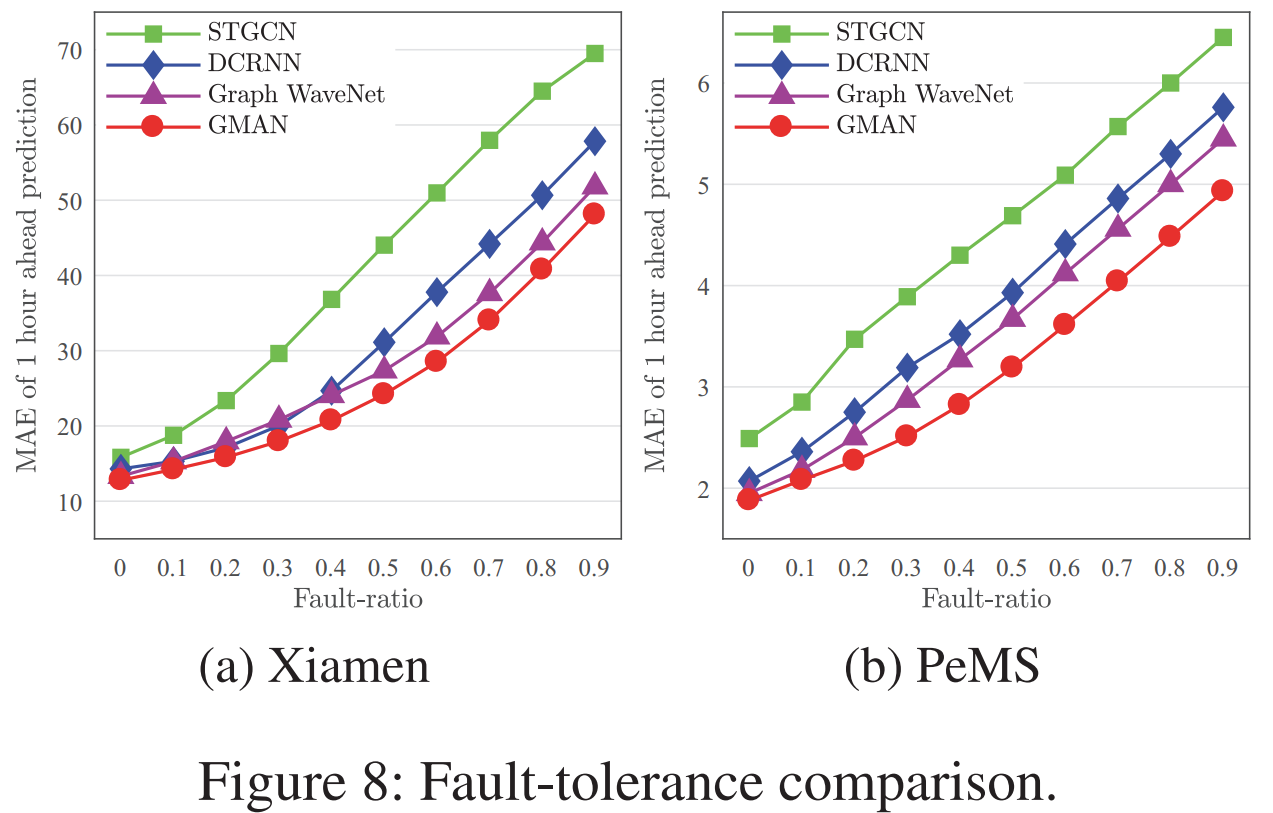
- 10~90% 비율로 random하게 0을 집어넣었음. 이때의 결과는 GMAN이 가장 좋음. Xiamen시 data에서 fault-ratio 50%까지 MAE 25% 수준으로 버팀. PeMS는 훨씬 잘 버팀
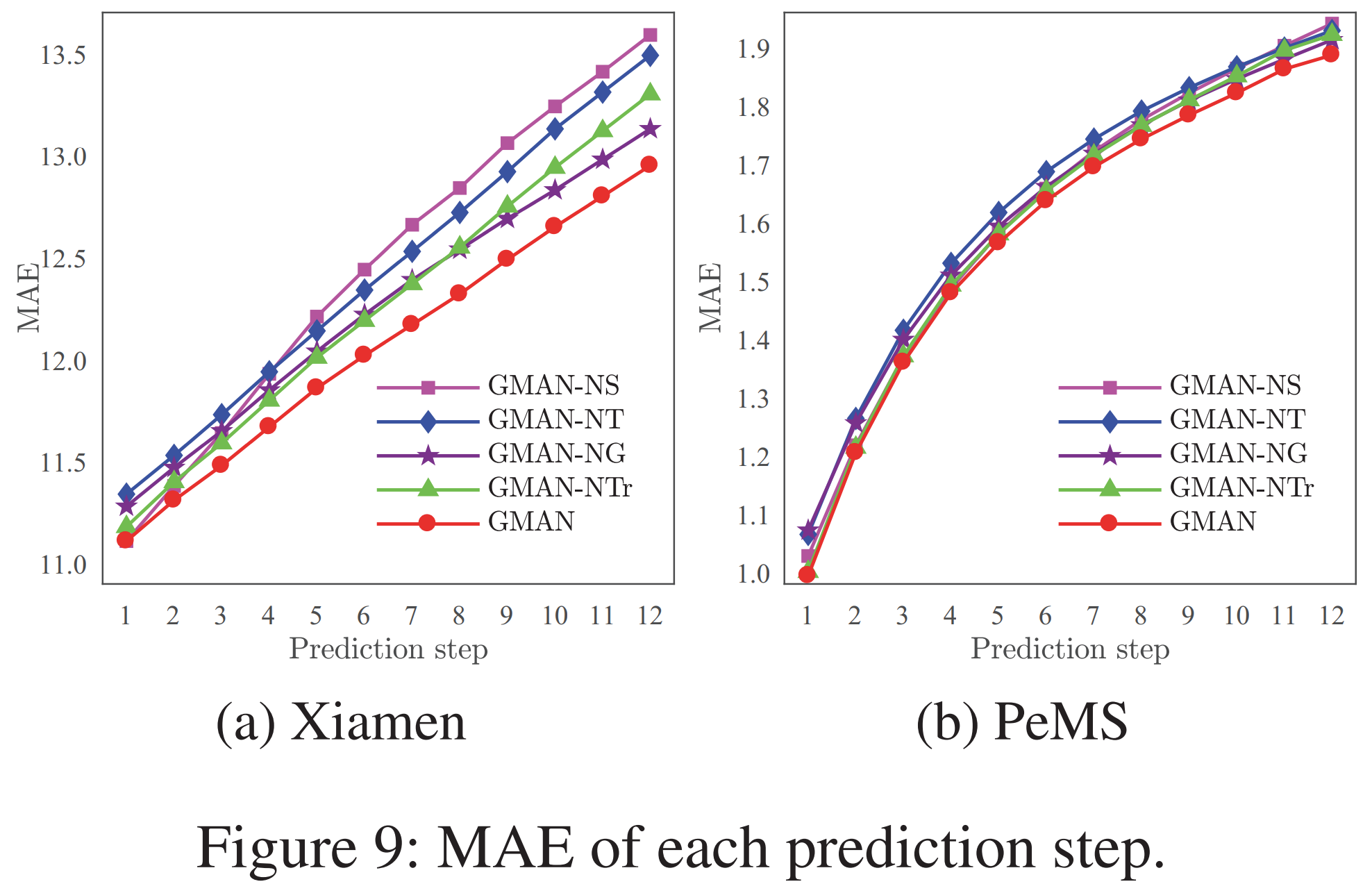
- 각 모듈의 효과를 평가하기 위해 모듈의 구성 요소를 제외하였을 떄의 효과를 평가하였음. 당연히 모든 요소가 다 있는 것이 잘 되고, non-gated fusion, non-transform attention, non-temporal attention, non-spatial attention 순으로 모델이 안 좋아짐. Spatial attention이 의미가 있다는 점이 중요한 대목인듯 (Xiamen 데이터 기준. PeMS는 구분이 어려움)
교통 공학적 분석 내용
- 먼 시간 간격이 떨어진 데이터를 예측하면 application 측면에서 이득이 많다고 주장함
- 교통 상황에서 결측이 발생하는 경우가 있을 수 있음. 이런 경우를 모사하기 위한 노력을 하고, 모델의 robustness를 측정함
의문점 및 느낀점
- Spatial Embedding과 Temporal Embedding를 단순히 더하는 것으로 모델이 STE 내부의 spatial한 특성과 temporal한 특성을 잘 파악할까? Transformer에서 positional encoding을 embedding에 더한 것에서 착안한 것 같은데, 지금도 왜 되는지 신기한 면이 있음
- 무거운 모델임. Spatial/Temporal/Transform 세 요소에 모두 어텐션을 활용했음. 애초에 softmax 계산이 그렇게 쉬운 계산이 아님. 단순하게 가는 법이 없고 최소한 1개의 FC layer는 포함하여 parameter를 결정함
- 엄밀이 말하면, 이 모델은 GCN과는 거리가 있음. Adjacency matrix를 기반으로 message passing을 하는 기존 scheme과 다르게 spatial embedding을 구하고, SE를 다른 node feature embedding에 concat해서 활용하기 때문


